

咨询电话
13924666952
400-158-1606

RX系列驱控一体机器人控制系统,权限切换在超级管理员,I/O设定如下:首先点击“IO设定”按钮进入如下所示的界面,在此界面下可对IO进行相关设定。
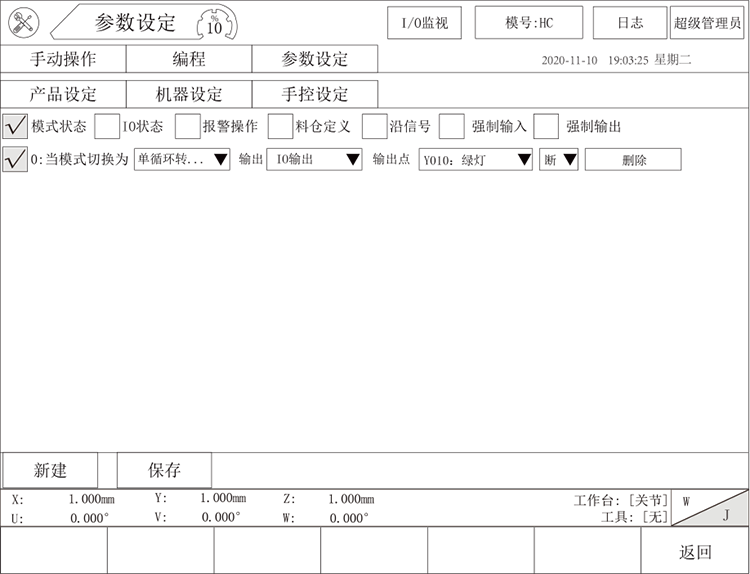
一、模式状态功能主要用于切换成某种模式后能自动控制信号的通断状态。
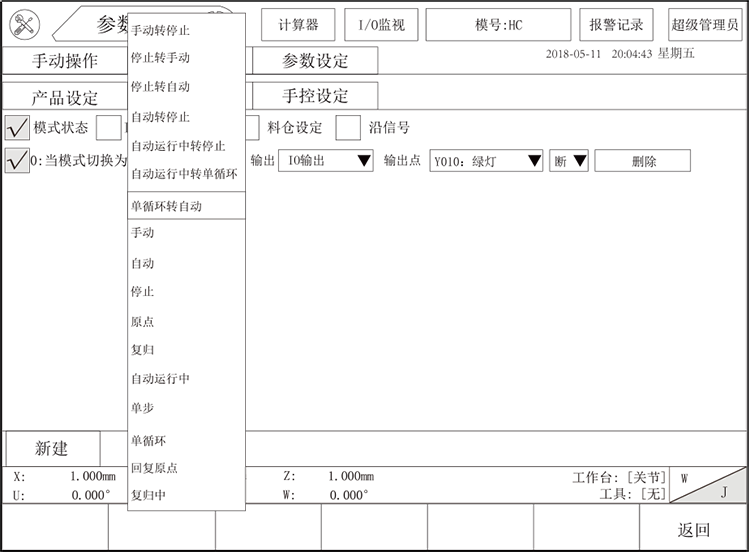
首先点击新建按钮并将新建成的进行勾选,然后在“当模式切换为”选择相应的状态,如:手动,自动,自动转停止等等。再在“输出”里选择IO输出或者M值输出,然后在“输出点”里选择相应的点。
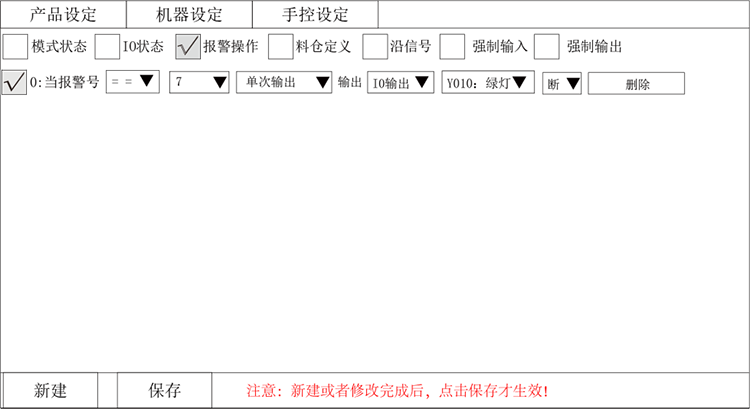
注意:可以新建多个且只有点击保存才生效,不用的时候可以去掉“√”或者点击后面的删除(也需要点击保存)。
二、IO状态功能主要用于某些模式下通过控制输入输出某个信号的通断状态来自动使另一个输出信号进行通断。
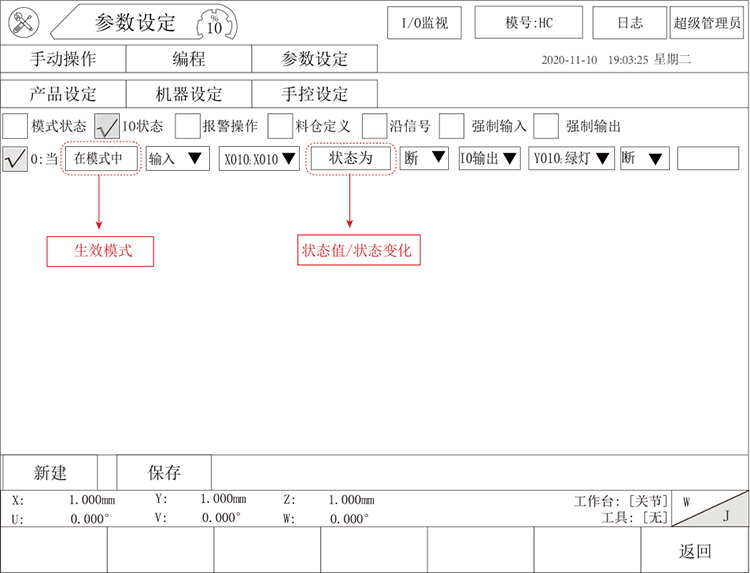
首先点击新建按钮并将新建成的进行勾选,然后点击“在模式中”选择相应的状态,如:手动模式、停止模式、自动模式等等。再选择输入或输出某个点通或断时能使某个输出点通或断即可。
注意:选用状态变为时,将检测沿信号进行切换。
三、报警操作功能主要用于当报警号满足某个条件时能控制某个输出信号的通断状态。
四、料仓定义功能用于定义料仓。
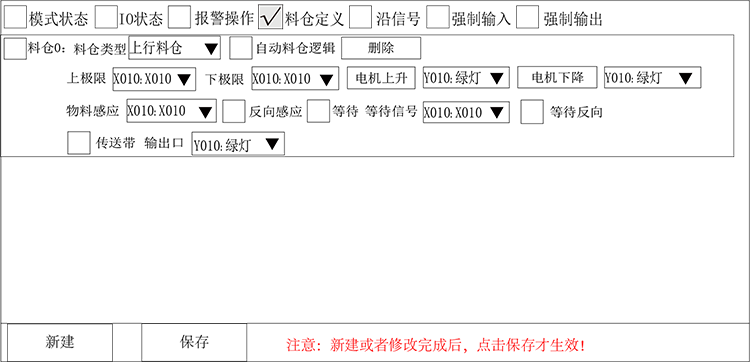
点击新建新建一个料仓,可以对料仓物料进行取料,当电机感应到上升信号则将料仓上升到取料点进行取料,如果感应到料仓无料后则继续上升,直到上升的极限点,如到达极限点后还感应到料仓无料则进行下降。
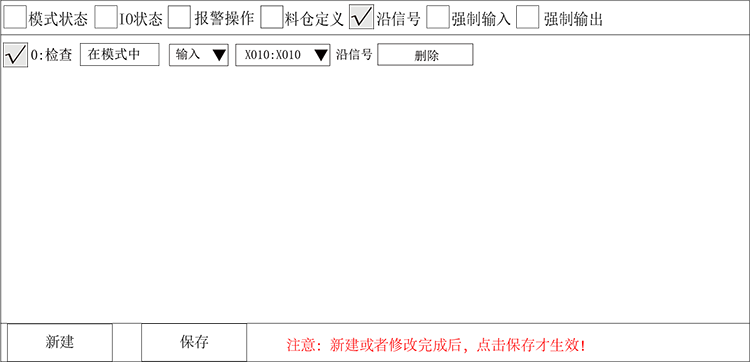
五、沿信号功能主要用于检查某些模式下是否有上升沿或下降沿信号,即不一定只能在自动运行中才能检测到沿信号,当非自动状态下有沿信号时也能检测到并运行。
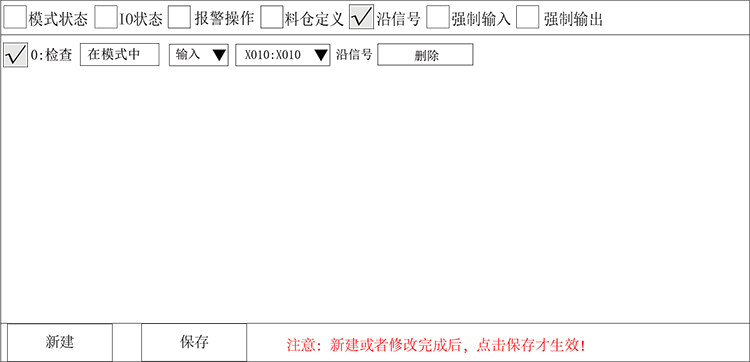
首先点击新建按钮并将新建成的进行勾选,然后点击“在模式中”选择相应的状态,如:手动模式、停止模式、自动模式等等。再选择输入类型和输入点即可。
具体应用如下:
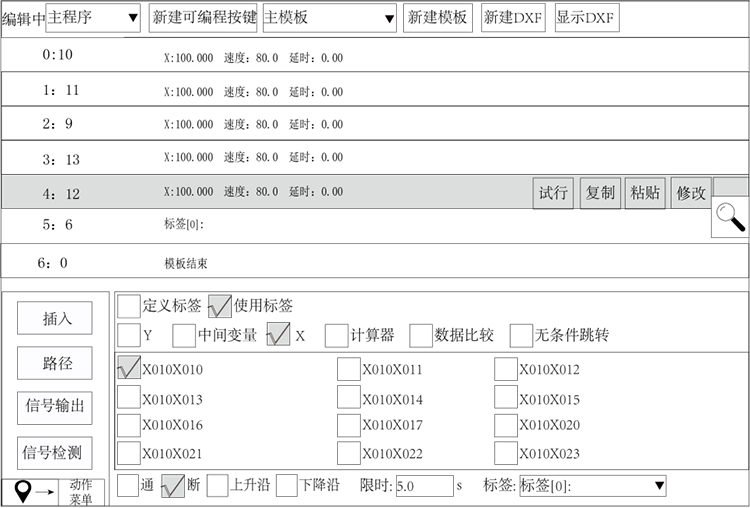
1、教导x轴运动仅当有X10上升沿信号时Y轴才运动的动作,程序如下:
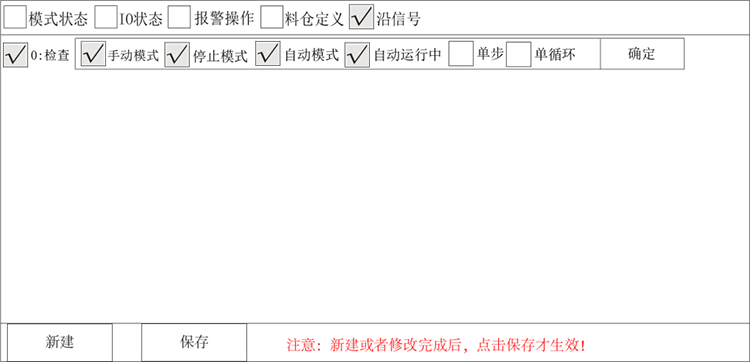
2、打到停止状态,进入IO设定页面,勾选沿信号,新建一个沿信号检查,点击“在模式中”按钮选择手动、停止、自动模式、自动运行中后点击确定按钮。然后选择输入信号X10后点击保存按钮即可。
3、在手动状态或停止状态或自动状态或自动运行中给一个X10上升沿信号后直接打到自动跑自动,X轴运动后Y轴也运动。
六、强制输入输出功能

1、强制输入于强制输出功能相似,保存后生效。
2、保存后,勾选的IO将保持输出/输入状态。

