

咨询电话
13924666952
400-158-1606

EC-RX系列为华成工控推出的驱控一体机器人控制系统,机器人控制系统手控器功能键详解,如下图:

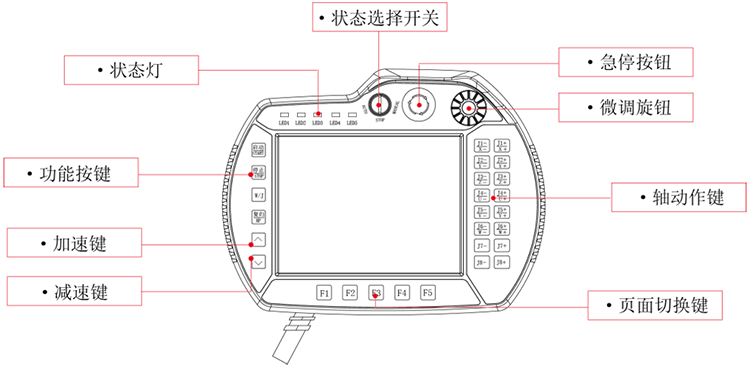
一、功能按键
启动:
功能1:自动状态下按下“启动”按键则机械手进入自动运行状态;
功能2:停止或手动状态下先按下“复归”键再按下“启动”键则机械手进行原点复归动作。
停止:
功能1:全自动状态下,按下此键,则系统进入单循环模式程序运行到模组结束后停止,如果再按一次(连续两次按)“停止”键则机械手立即停止运动。
功能2:在出现报警的时候在停止状态下按此键可清除掉已经解决的报警显示。
W/J:
按下此键,可在世界坐标与关节坐标之间切换。
*注意:可在此按键中选择回原点的方式以及回原点的顺序。
复归:
按一下“复归”键再按一下“启动”键所有轴依次回到原点位置。
*注意:也可在此按键里加入其他指令,如在按复归回原点时让某输出点断开。
加速/减速:
这两个按键可用于调整手动与自动时的全局速度。
急停按钮:
紧急情况下按下急停按钮,会断掉所有轴的使能,系统报警“紧急停止”,将旋钮旋出后,按下“停止”键,可消除报警。

二、使能开关按钮(上图)
手控器背后有一个使能开关按钮,手动页面下或者停止页面下操作各个轴动作按键或者进行复归的时候需要一直长按着,使各个轴使能,否则轴不使能,机械手就不会动。
注意:使能开关按钮有两种功能状态:使能和不使能;有三种使用状态:未按、轻按和重按。功能状态分别与使用状态对应,对应情况如下:
功能状态 | 使用状态 |
使能 | 轻按 |
不使能 | 未按 |
重按 |
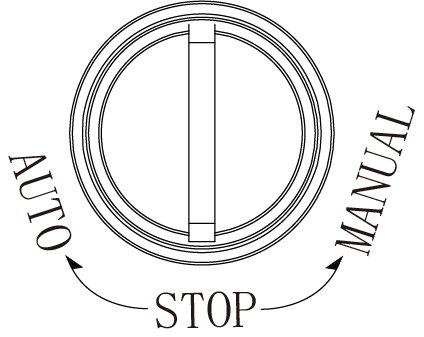
三、状态旋转按钮(上图)
系统有手动、停止、自动三种运行状态,将状态选择开关旋至右边档位为手动状态,在该状态下可对机械手进行手动操作;将状态选择开关旋至中间档位为停止状态,在该状态下机械手停止所有动作,可对机械手进行原点复归操作,还可进行参数设定。将状态选择开关旋至左边档位,并按一次“启动”键,机械手即进入自动运行状态。
手控器的状态分为3种,分别为手动、停止、自动。
手动(MANUAL):将状态选择开关打到右边即进入手动状态,在此状态下可以进行手动操作。
停止(STOP):将状态选择开关打到中间即进入停止状态,在此状态下可以进行参数设定。
自动(AUTO):将状态选择开关打到左边即进入自动状态,在此状态下可以进行全自动运行。
四、微调旋钮
作用:手动状态精确调位时,可以用此旋钮对轴进行精确移动。

操作方法:单击打开“手动软键盘按钮”,单击勾选“手轮选择”选项,选择手轮速度、在左边选项框选择需要微调的轴或者按一下需要微调的轴按键(手控器上)然后滚动微调旋钮即可使轴一点一点移动至目标点。
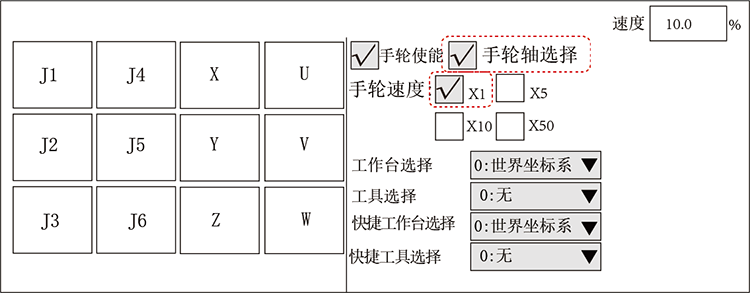
手轮速度说明:
×1:动一格轴平移0.01mm或轴转动0.01度。
×5:动一格轴平移0.05mm或轴转动0.05度。
×10:动一格轴平移0.1mm或轴转动0.1度。
×50:动一格轴平移0.5mm或轴转动0.5度。
世界坐标:以机械手底座中心为原点,工具末端点的位置与姿态。
关节坐标:马达坐标经过机构耦合关系转换后的坐标值。

