咨询电话
13924666952
400-158-1606

SCARA机器人控制系统是华成工控系列的水平多关节四轴驱控一体机器人控制系统,系统中的标定工具包括了两点法、三点法、多点法,具体介绍如下:
建立了工具坐标系后,机器人的控制点也转移到了工具的尖端点上,这样示教时可以利用控制点不变的操作方便地调整工具姿态,并可使插补运算时轨迹更为精确。
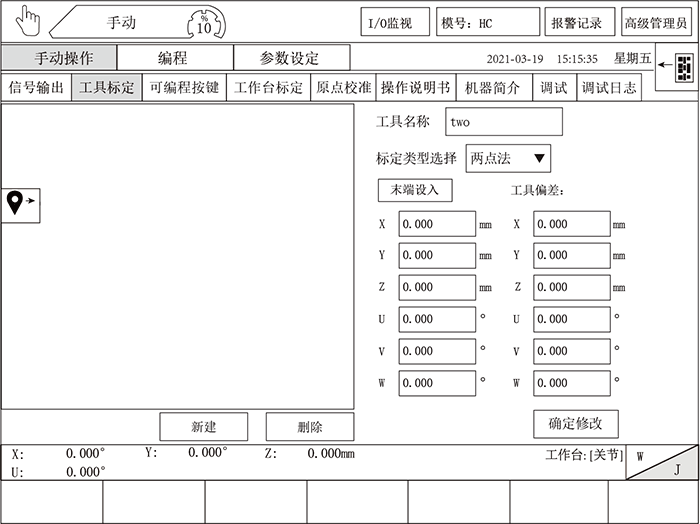
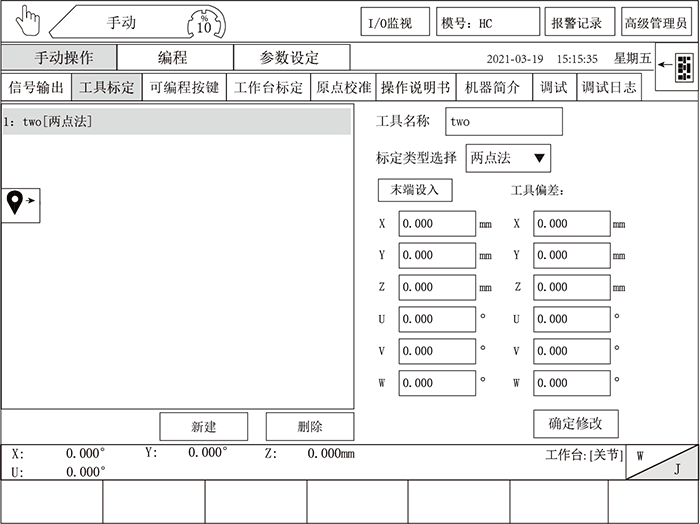
1、两点法
两点法标定需要知道工具各个方向的偏差(偏差是指工具尖端点在法兰盘坐标系下的坐标值),然后填入偏差数据,用户在已知工具的偏差的情况下才可使用两点法。
使用方法:
第一步:机械手在原点的情况下点击“末端设入”按钮设入机械手末端的坐标值。
第二步:手动输入各轴的工具偏差值。
第三步:设置完成点击确定修改按钮。
2、三点法
三点法:顾名思义,需要设置三个点。
使用方法:
1)输入工具名称,选择标定类型三点法,点击新建。

2)选一个标定点,放置一个标定工具。
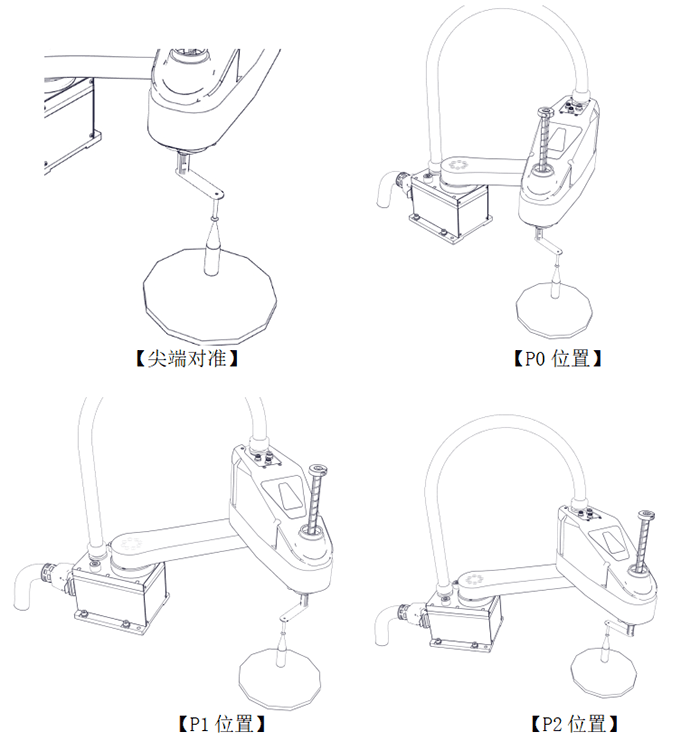
3)移动机械手到标定点正上方,机械手的尖端要与标定工具的尖端对准,设入P0;转到U轴获取新的角度,移动机械手使其尖端对准标定工具的尖端,设入P1(P1的U轴角度要与P0的U轴角度相差90~120度);再次转到U轴获取新的角度,移动机械手使其尖端对准标定工具的尖端,设入P2(P2的U轴角度要与P0/P1的U轴角度相差90~120度)。示意图如下:
4)设置完成后,点击确定修改即可。
3、多点法
多点法:标定时,设置多个点位(四个点及以上且各点姿势不能相同)
使用方法:
1)输入工具名称,选择标定类型多点法,点击新建。
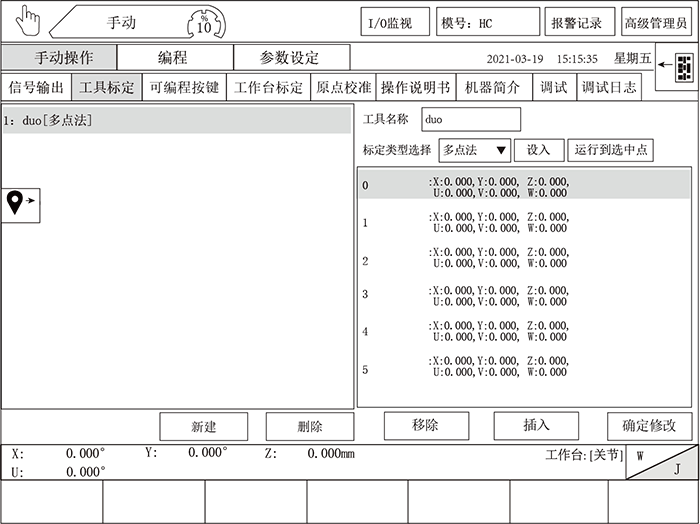
2)选一个标定点,放置一个标定工具。
3)移动机械手到标定点正上方,机械手的尖端要与标定工具的尖端对准,设入P0;转到U轴获取新的角度,移动机械手使其尖端对准标定工具的尖端,设入P1;再次转到U轴获取新的角度,移动机械手使其尖端对准标定工具的尖端,设入P2;再次转到U轴获取新的角度,移动机械手使其尖端对准标定工具的尖端,设入P3;以此类推,改变U轴坐标,设置多个点。
4)设置完成后,点击确定修改即可。
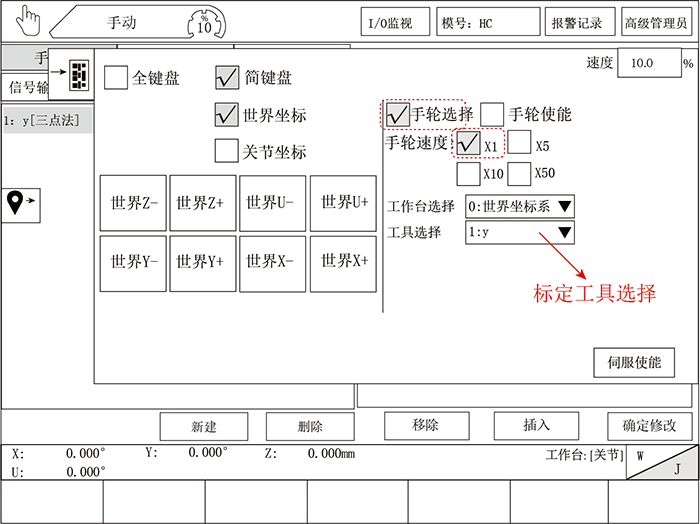
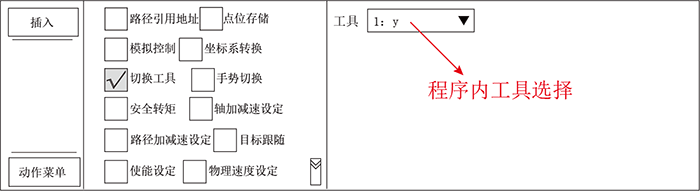
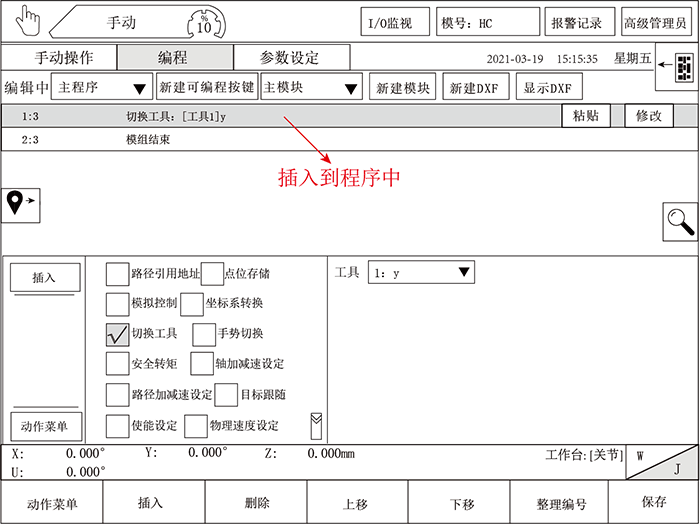
在教导程序之前,首先切换为工具坐标,才能教导出正确的坐标位置;在程序运行之前需要将程序坐标系切换为工具坐标。如下图: