咨询电话
13924666952
400-158-1606

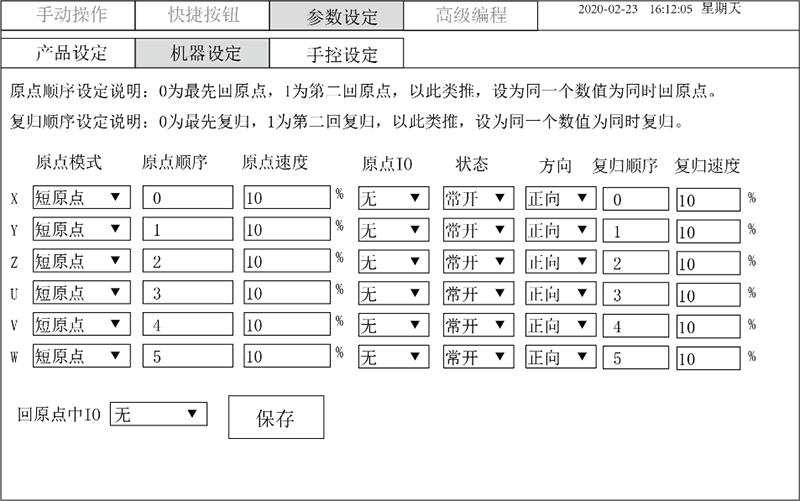
桁架机械手使用系统是ECTC系列机械手控制系统,原点设定的相关内容,如找原点顺序、原点速度、原点信号、原点信号状态、首次找原点方向、复归顺序、复归速度、回原点中IO信号等的设置操作如下:
原点设定页面可以设置找原点程序的设置内容,包括找原点顺序、原点速度、原点信号、原点信号状态、首次找原点方向、复归顺序、复归速度、回原点中IO信号等。
原点模式原点模式分为长原点和短原点两种:
长原点:先感应到原点信号后,继续运动直到原点信号消失再反方向运动,直到重新 感应原点信号后停止,停止位置即为原点位置。
短原点:感应到原点信号后立即反转一圈,再往初始回原点方向低速找原点,再次感 应到原点信号后停止,停止位置即为原点位置。
原点顺序数字越小,越早回原点,数字相同,同时回原点。
原点速度从开始回原点到碰到原点信号的运动速度,合理设置原点速度,对原点位置的准确性很有帮助。
原点IO原点感应开关信号的输入IO,必须设置,出厂默认为无,未设置原点信号会报警:原点信号未设定。
状态铁片接触感应开关,信号为通选常开,信号为断选常闭
方向原点信号在轴的负方向选正向,在轴的正方向选反向,系统默认在负方向找原点。
复归顺序同原点顺序(可更改)
复归速度同原点速度(可更改)
回原定中IO设置此IO后,回原点过程中对应的IO会输出通,回原点结束后输出断。
注意:点击保存后会直接覆盖“可编程按键[0]:原点”和“可编程按键[1]:复归”中的所有程序,请按照实际情况是否使用该方法设置原点程序和复归程序。
找原点流程:
按照设置的原点方向和速度第一次找原点开关,碰到原点开关后,改变方向,速度降低,离开原点开关,若此时电机未转满一圈将会往远离原点开关的方向转动一圈,转满一圈后再次找到调转方向找到原点开关,以较慢的速度接近原点开关,接触到原点开关后,开始执行寻找上次记录原点位置的编码器单圈值程序,直到找到上次记录位置。回原点结束。若长时间未结束请将“原点误差脉冲”调大。若两次记录的原点偏差过大,将会报警原点偏移,此时原点位置已经发生变化。