

咨询电话
13924666952
400-158-1606

工业机器人系统为华成工控系列六轴机器人控制系统,以下教导程序的举例,可以进一步了解和实践机械手的编程。在自行教导机械手程序时,根据实际情况来设定各伺服轴的位置和对多关节机器人的控制。
程序目的:该程序用来进行堆叠,机械手停在待机点位置等待机械手开始运动信号。机械手开始运动后,机械手在取料点位置取料,取料完成后,进行堆叠,直到堆叠堆满。
程序过程:
将机械手调到自动运行状态。
机械手运行到待机点位置,等待开始信号。
调用取料模块,进行取料。
取料成功后输出取料成功信号,并前往堆叠。
机械手将产品放到堆叠指定位置。
堆叠完成所有位置后,机械手前往安全点位置,清空计数器。
机械手返回待机点位置,等待开始信号。
主程序主模块程序:

主程序模块[0]:取料程序:
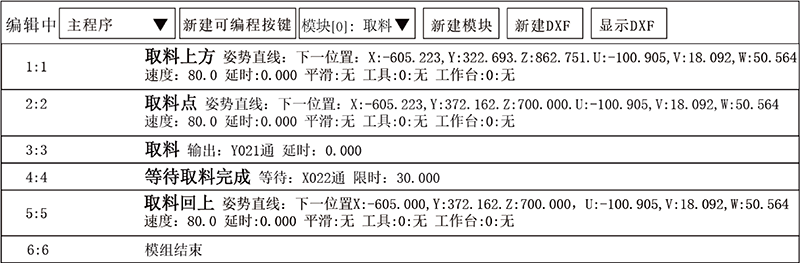
注意:此程序为模板,机械手位置信息请根据实际所需进行设置。

