

咨询电话
13924666952
400-158-1606

五轴注塑机械手控制系统为华成系列产品,系统中的结构原点定义页面设置如下:
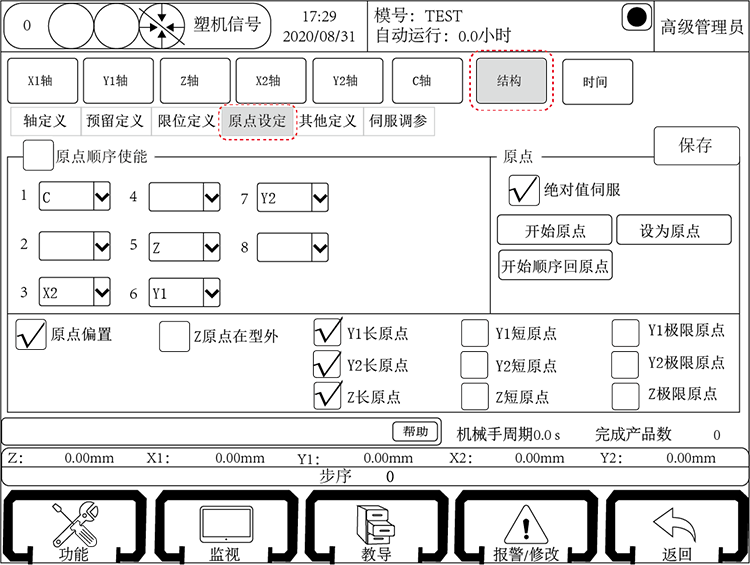
原点的绝对值伺服:
勾选绝对值伺服:回原点为绝对值方式
不勾选绝对值伺服:回原点为增量方式。
注意:修改回原点方式,并保存后,需退出当前页面,新的回原点方式才起作用。
原点轴的使能顺序操作,原点顺序使能:
勾选原点顺序使能并保存后,按照所设定的轴顺序增量回原点,如需X1-Y1-Z方式回原点,则需设置1为X1,2为Y1,3为Z,4/5/6/7/8选为无;若1设为无,2选为X1,3选为无,4选为Y1,5选为Z,6/7/8为无或其他轴,则无法正常回原点。

