

咨询电话
13924666952
400-158-1606

水平关节机器人系统为华成系列SCARA机器人控制系统,原点校准操作如下:
切换到“手动”状态下,在此界面下可进行原点校准。
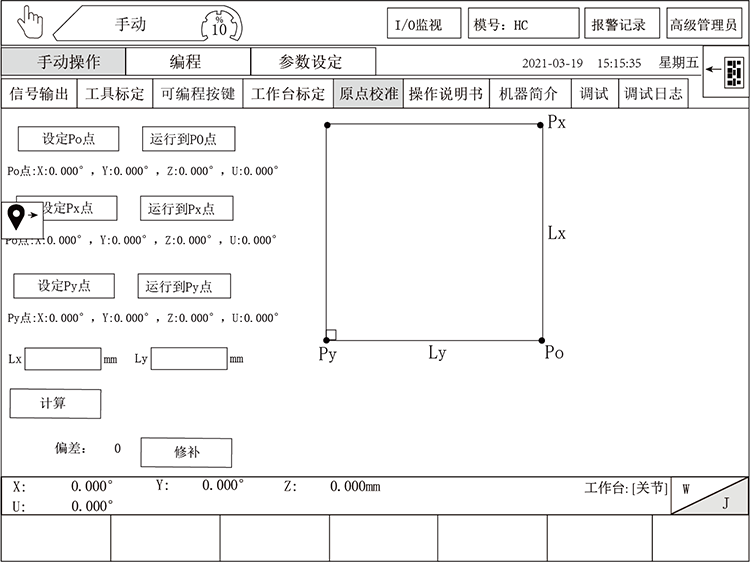
操作方法:
1)制作一个长为x(mm),宽为y(mm)的标准矩形,并将将矩形放在水平的平面上。
2)如上图,以矩形的一个角为Po,设入Po位置;从Po点移动x(mm)到另一个角Px,设入Px的位置;再从Po点移动y(mm)到另一个角Py,设入Py的位置。
3)在Lx和Ly编辑框中分别输入x(mm)和y(mm),点击计算偏差。
4)计算偏差后,点击修补,即可完成原点校准。
注意:原点校准后需断电重启。

