

咨询电话
13924666952
400-158-1606

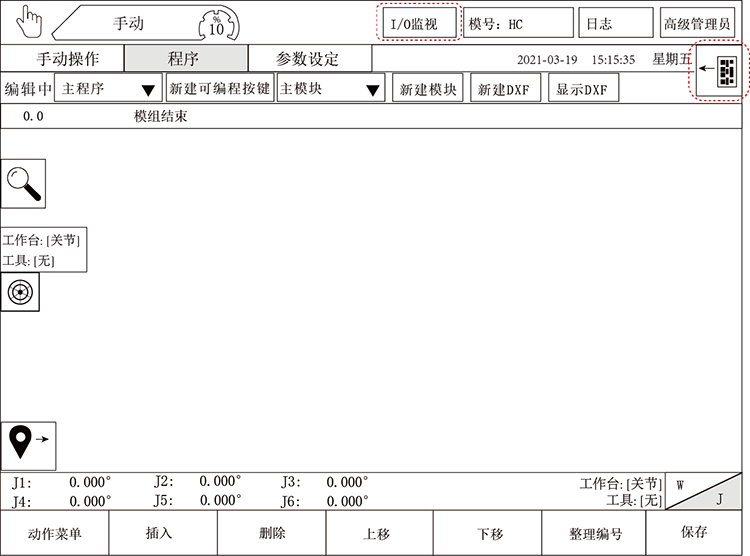
工业关节机器人示教器编程,系统为华成系列六轴关节机器人控制系统。编程界面路径——将手控器(示教器)状态选择开关指向“MANUAL”即“手动”,机械手进入手动状态,点击“编程”按钮,进入编程页面,在此页面中可以进行程序的编辑和修改。
点击左下角的“动作菜单”按钮可进入动作教导主页面,在该页面可对各类动作进行编辑。如下图:
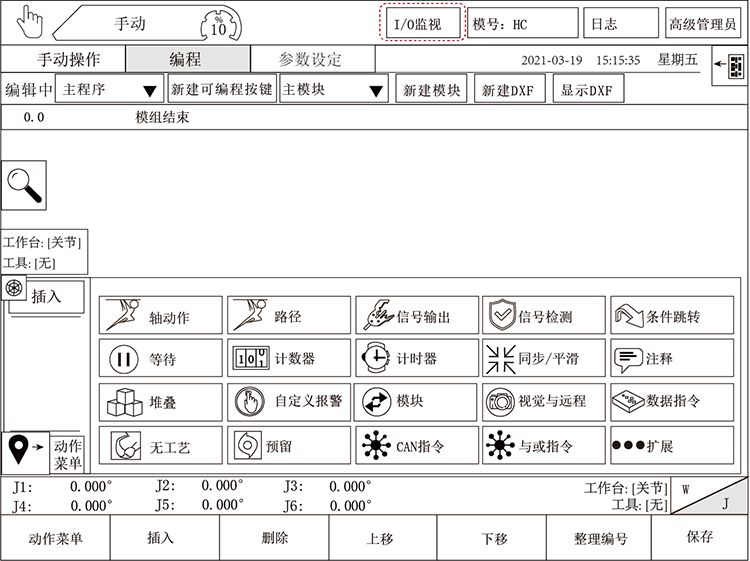
单击“轴动作”按钮进入如下界面:
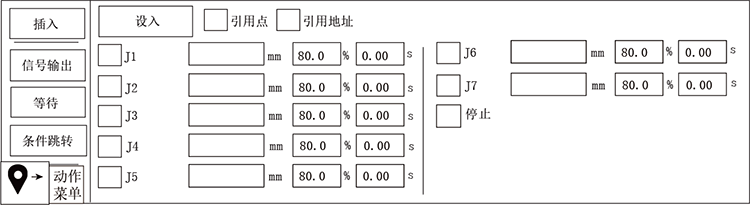
插入:勾选动作选择要插入的位置单击一次“插入”按钮即可插入目标动作。(*注意:必须先选中程序中想要插入目标动作的后面一步动作,即插入的目标动作为选中动作的上一行)
设入:手动控制轴到目标位置后,点击“设入”,即可将当前位置的点坐标自动设入,再点击“插入”即可把目标点的位置教导到程序中。
引用点:在引用点编辑按钮页面中新建有关节点后,可通过勾选引用点直接引用已建有的关节点。
引用地址:勾选“引用地址”可直接在轴位置框中输入所要引用的地址数值,代表引用该地址的内容。
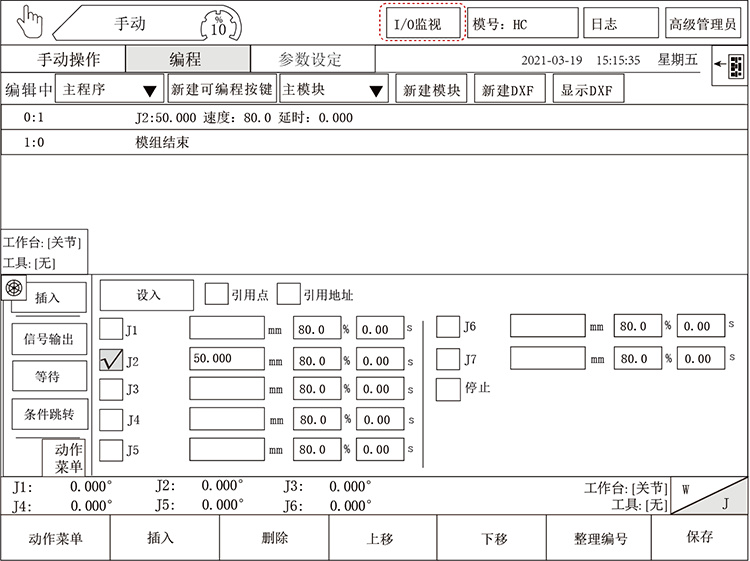
轴动作使用范例:在主程序中教导J2轴以80%的速度运行到50位置。
针对关节机器人编程——“动作菜单”其他如路径、信号输出、信号检测、条件跳转等如何操作,留意下一章节;或者下载说明书《关节机器人控制系统用户使用手册》查看4.2章节——动作菜单。

