首页
产品中心
服务与支持
解决方案
新闻动态
关于我们
联系我们
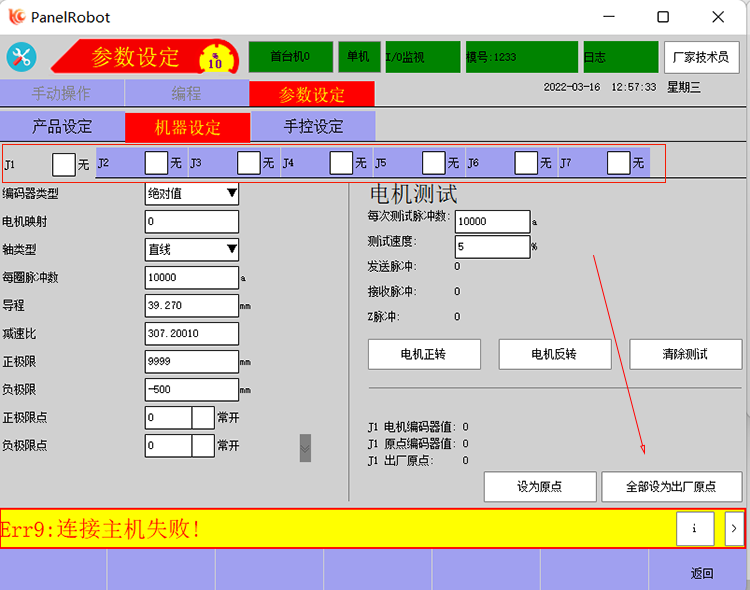
工业机器人系统为华成系列六轴机器人控制系统,零位校准意义在于工业机器人零位是机器人操作模型的初始位置。当零位不正确时,机器人不能正确运动;华成的六轴机器人控制系统零位校准操作:
首先,工业机器人需要校准机械零位,先手动将机器人走到零位,对准刻度后,点击电机参数界面的全部设为原点。
注意:由于机器人系统的伺服是默认为绝对值伺服,所以原点设置一次后,在第二次设置原点前将会一直以第一次设置的原点位置为原点,断电也不会影响。
版权所有 © 深圳市华成工业控制股份有限公司 未经许可不得复制、转载或摘编,违者必究 版权声明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
网站ICP备案号: 粤ICP备19106162号
技术支持:新新网络
咨询电话
13924666952
400-158-1606
官方客服微信