

咨询电话
13924666952
400-158-1606

工业机器人在运作过程中普遍会设置机器人的安全区域,也可以理解为工作范围。主要目的是为了机器人运行时的安全性和可靠性。华成工控系列的工业关节机器人控制系统——六轴机器人控制系统,安全区参数设置如下。
首先在停止状态下,点击 “安全区参数”进入如下界面:

世界坐标软限位:此类型用于世界坐标的限制,当世界坐标超过设定范围时会报警超过世界软限位,使能勾选后有效。
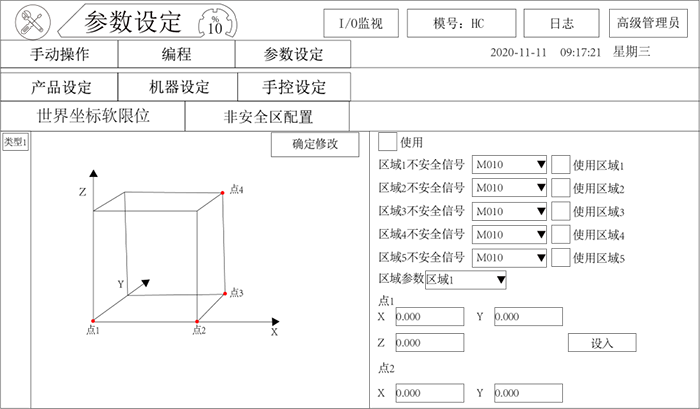
非安全区配置:
1、设置区域,可以同时使用多个区域
2、设置区域边界点,根据设入点位,可以生成一个立方体为安全区

3、勾选使用的区域
4、设置好所有轴的限制点后勾选使用框并点击“确定修改”按钮

5、超出安全位会报警,且输出M值信号

