

咨询电话
13924666952
400-158-1606

EC-RX系列驱控一体系统,机器人控制系统。运行参数界面参数设置,单击“运行参数”图标按钮进入如下界面:
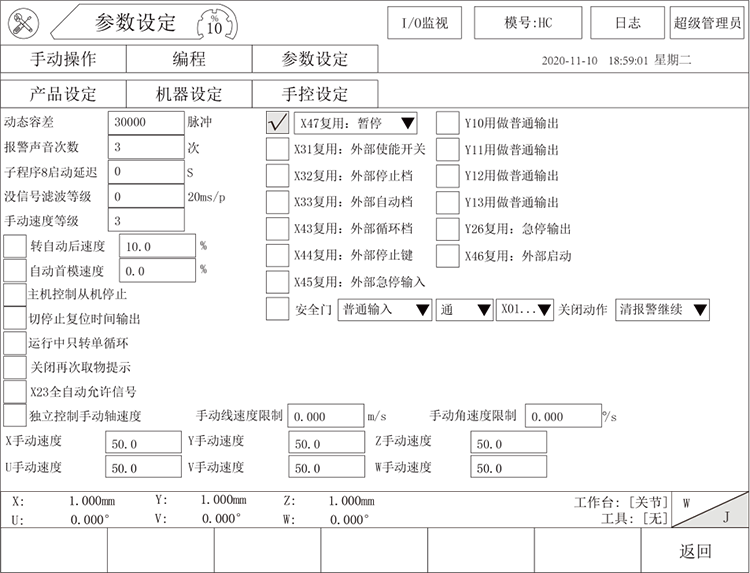
动态容差:发送脉冲和反馈脉冲之间的差值。
静态容差:发送脉冲和反馈脉冲之间的差值。
转自动后速度:三挡旋钮打到自动状态下跑自动时默认的运行速度设置。
报警声音次数:设置出现报警时Y013输出点闪动几次。
手动速度等级:调节手动速度,即在相同手动速度如手动速度都是10%的情况下,手动速度等级为1时按下手动轴按键只移动两三毫米,手动速度等级为10时按下手动轴按键能移动大致二十毫米。
首模速度:自动时第一模的速度
安全门:定义安全门信号点,勾选使用安全门后自动时必须有相应的输入点通或断,否则将报警Err36,导致无法跑自动。
关闭动作:自动运行过程中安全门报警时,关闭安全门后的机械手动作。该功能与安全门功能配套使用,当安全门勾选为使用时,假设设定安全门信号为X10通,自动时当X10信号断开即打开了安全门,将出现报警安全门开,此时若选择了清报警继续,则关闭安全门即接通X10信号后将自动清除报警机械手继续运行,若选择了停留,则关闭安全门即接通X10信号后将自动清除报警机械手暂停,按下启动键机械手才能继续运行,若选择了复位启动,则关闭安全门即接通X10信号后将自动清除报警并复位重新运行。
独立控制手动速度:勾选此项后可设定手动状态下各轴的速度。
子程序8启动延迟时间:当教导有子程序8时,子程序8启动的延时时间。
沿信号滤波等级:有效沿信号的维持时间,如沿信号滤波等级设为1,则沿信号需要维持在20ms时间才算是有效的沿信号,若低于20ms则为无效沿信号。
远程控制功能(外接输入点复用功能按钮):

勾选“X32复用:进入原点模式”、“X33复用:进入自动模式”、“X46复用:启动”、“X47复用:暂停”这几个选项之后可外接相应的输入点可对“原点”键、“启动”键、“停止”键以及“进入自动状态”进行远程控制。
勾选X32复用:进入原点模式→点亮相当于按了一次手控器“原点”按钮;
勾选X33复用:进入自动模式→点亮相当于把三挡旋钮打到自动;
勾选X46复用:启动→点亮相当于按了一次手控器“启动”按钮;
勾选X47复用:暂停→点亮相当于按了一次手控器“停止”按钮;
特别说明:
1、点亮一次X47(暂停)则机械手立即停止。如是系统有报警则点亮一次X47可清除掉已经解决的报警。
2、使用复用的按键可在自动状态下进行原点复归动作,但是这种状态下去按手控上的“原点”按钮再按“启动”按钮不会进行原点复归(需旋钮要打到自动按才有效)。
注意:被使用做复用的点不可再做其他作用。
外部使能开关:
勾选此功能后外接X31输入点可用于外部使能开关控制,接通X31信号即所有轴能进行伺服使能,断开X31信号即断开所有轴的伺服使能,此时若进行任何轴动作都会报警伺服未使能。
普通输出:
勾选相应的输出点将用做普通输出点,例如勾选Y12和Y13,Y12红灯和Y13报警将不再作为红灯和报警灯使用即当出现报警时Y12 和Y13将不再有输出,而是作为普通输出点来使用。
运行中只转单循环:

勾选此功能后运行过程中按一次或多次停止键按钮都是变成单循环状态进行单循环。不勾选此功能则为运行过程中按一次停止键按钮为单循环即走完当前模动作后才停止,按两次停止键按钮则为机械手暂停即立即停止运行。

