

咨询电话
13924666952
400-158-1606

华成机械手控制系统——伺服电机的PI参数怎么进行调试?首先先记着这一段口诀:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线震荡很频繁,比例度盘要放大;
曲线漂浮绕大弯,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线震荡频率快,先把微分降下来;
动差大来波动慢,微分时间应加长;
理想曲线两个波,前高后低四比一;
一看二调多分析,调节质量不会低。
调试方法一:PID调节规则
1. 清除参,增P,使输出最短时间内达到期望值。
2. 系统震荡,P值调节大了,应较减小P值,直到振荡消失;调节完P后,你的系统的实际值也许会稍大于或小于你的期望值(可看作稳态误差) ,不用担心,下面的步骤会修复这点。
3. 缓慢的增加I值直到你的误差消失为止。如果你的输出让系统开始振荡了,可试着缓慢减小I值。
4. 如果你感到你的系统对误差的反应滞后了,你应该缓慢增加D值。 如果你的系统开始出现高频振荡了,这意味你有一个过大的D值放大了噪声导致的,这时你该适当的减小D值。如果你的系统有较大的噪声,最好保持D值为0值。(忽略)
5. 最后注意你的Limits值。
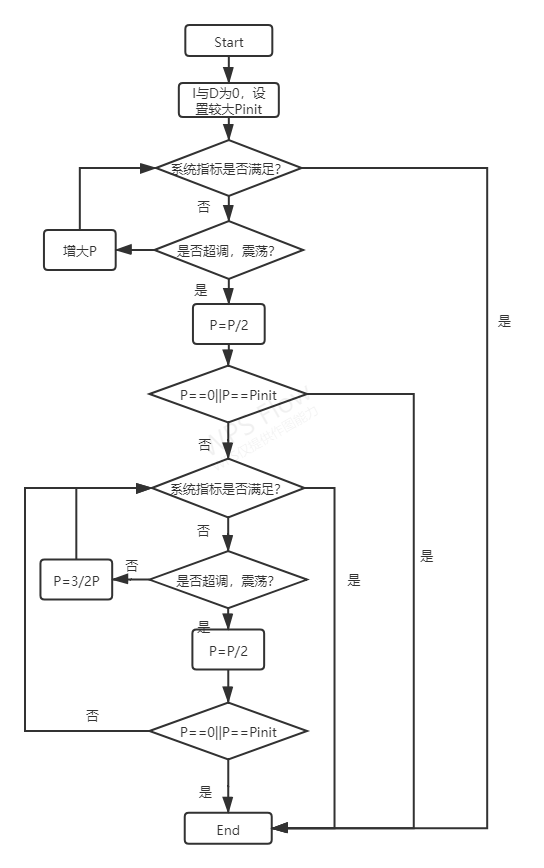
调试方法二:二分法
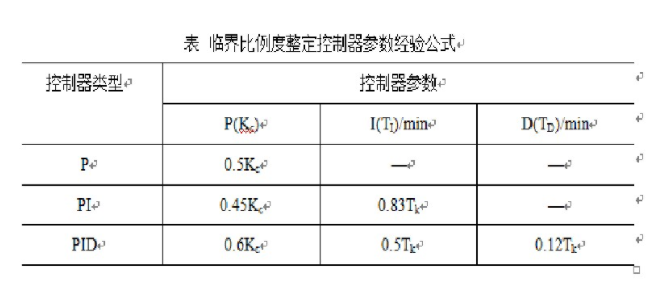
调试方法三:临界比例法
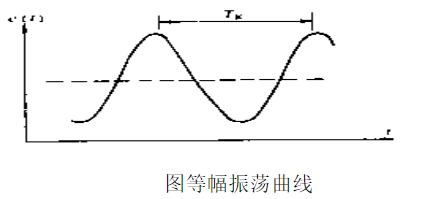
临界比例带法又称边界稳定法,其要点是将调节器设置成纯比例作用,将系统投入自动运行并将比例带由大到小改变,直到系统产生等幅振荡为止。这时控制系统处于边界稳定状态,记下此状态下的比例带值,即临界比例带KP以及振荡周期KT,然后根据经验公式计算出调节器的各个参数。可以看出临界比例带法无需知道对象的动态特性,直接在闭环系统中进行参数整定。
调试方法四:衰减法
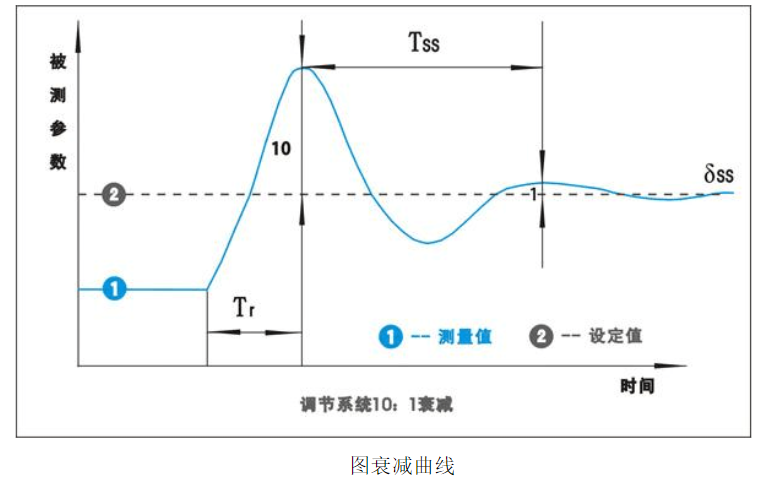
衰减曲线法是在总结临界比例带法基础上发展起来的,它是利用比例作用下产生的4:1衰减振荡(Ψ=0.75)过程时的调节器比例带∂,及过程衰减周期Ts,据经验公式计算出调节器的各个参数。
衰减曲线法的具体步骤是:
(1)置调节器的积分时间Ti→∞,微分时间Td→0,比例带∂为一稍大的值;将系统投入闭环运行。
(2)在系统处于稳定状态后作阶跃扰动试验,观察控制过程。如果过渡过程衰减率大于0.75,应逐步减小比例带值,并再次试验,直到过渡过程曲线出现4:1的衰减过程。记录下4:1的衰减振荡过程曲线,如图所示的曲线上求取Ψ=0.75时的振荡周期Ts结合此过程下的调节器比例带∂s,按表计算出调节器的各个参数。
(3)按计算结构设置好调节器的各个参数,作阶跃扰动试验,观察调节过程,适当修改调节器参数,到满意为止。

衰减曲线法PID参数整定经验公式
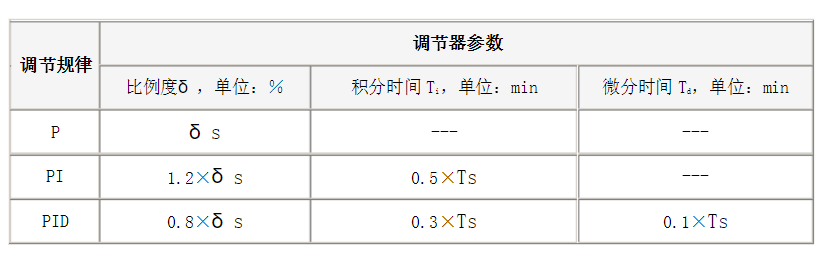
衰减曲线法PID参数整定经验公式

高压伺服调试方法
正弦响应:去使能后,将Pn10伺服模式设置为3,Pn61=100为转矩指令频率,使能。调节Pn65,Pn66,同时将Pn82写入1,观察波形,要求反馈不能超调,要求反馈不能滞后指令太多。指令幅值±800,反馈幅值不能小于±600。
阶跃响应:去使能后,将Pn10伺服模式设置为4,Pn61=100为转矩指令频率,使能。利用正弦响应得到的Pn65,Pn66,进行阶跃响应,观察波形,要求反馈不能超调,要求反馈不能滞后指令太多。指令幅值±1800,反馈幅值不能小于±1600。


低压伺服调试方法
将Pn282写入16384可以更改电流环比例增益Pn18,电流环积分时间常数Pn19。速度环比例增益Pn21,速度环积分时间常数Pn22。

前馈补偿调整:
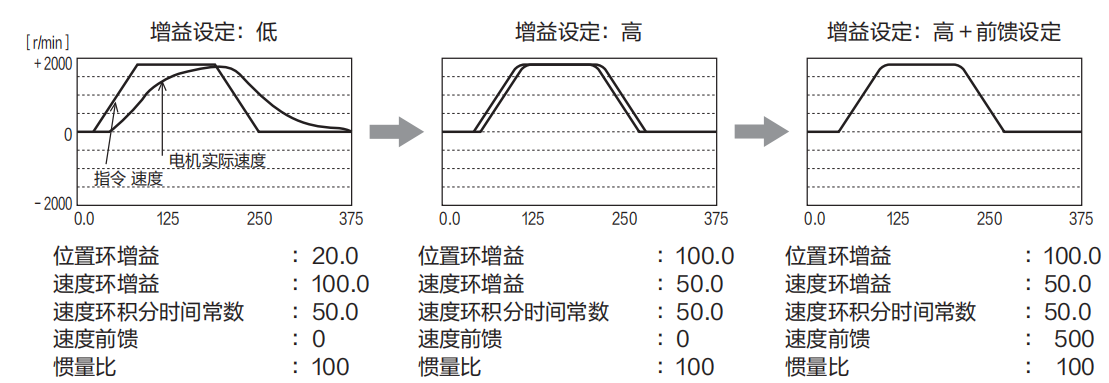
调整速度前馈增益Pn28,值为0-100%
调节方法:二分法。
陷波滤波调整:
将Pn03写入1,Pn72--陷波滤波频率,Pn73--陷波滤波频宽,
调节方法:二分法调整
先设置Pn73,给个200
开始二分法调整Pn72
直至控制电机不振荡。

