

咨询电话
13924666952
400-158-1606

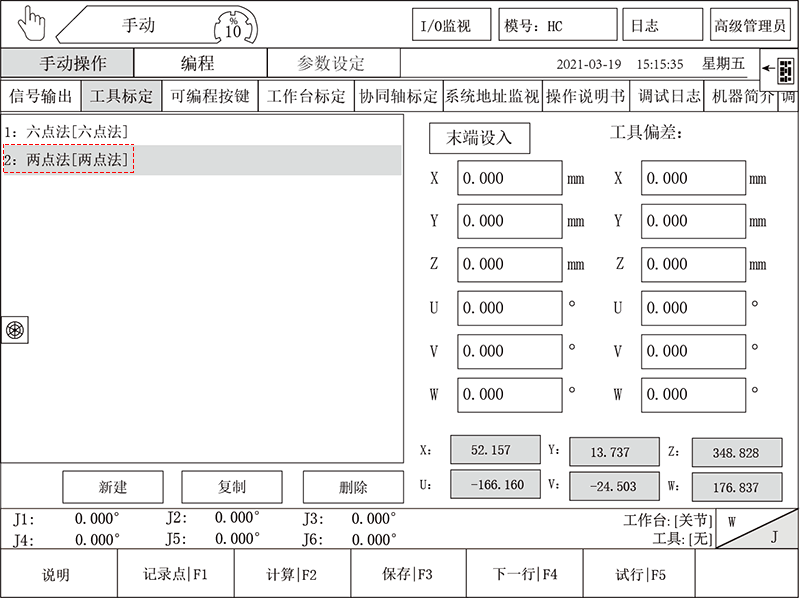
工业机器人控制系统是华成工控的六轴机器人驱控一体系统,工具坐标的标定有两点法、三点法、二十点法、二十三点法、五十点法、多点法。下面介绍两点法的坐标标定方法:
首先,工具名称选择“两点法”,两点法标定需要知道工具个个方向的偏差(偏差是指工具尖端点在法兰盘坐标系下的坐标值),然后填入偏差数据,用户在已知工具的偏差的情况下才可使用两点法。
使用方法:
第一步,机械手在原点的情况下点击“末端设入”按钮设入机械手末端的坐标值。
第二步,手动输入各轴的工具偏差值。
第三步,设置完成点击确定修改按钮。
在教导程序的时候,需要将坐标系切换为工具坐标系,然后在程序里面插入工具坐标系。
其他标定工具的操作,点击《工业机器人控制系统手动操作工具标定介绍》

