咨询电话
13924666952
400-158-1606

SCARA机器人的安全区参数设置,机器人控制系统为华成工控系列四轴水平关节机器人系统,安全区参数的设置如下:
首先将机器人手控器(示教器)三挡开关切换至停止状态下,如图:

点击“安全区参数”进入如下界面:
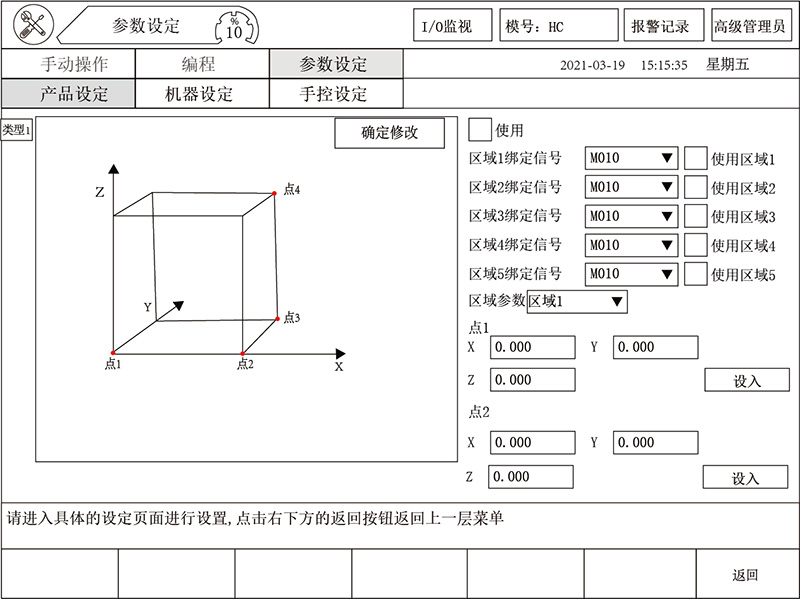
在此界面下可最多设置5个非安全区域。
备注:立方体内区域表示非安全区。
区域绑定信号:此“区域1绑定信号 M010”选项框中的信号代表机械手进入所规划的区域时,输入点有信号,而机械手退出所规划的区域时,输入点无信号。
使用操作流程:
1、设置区域绑定信号点。
2、勾选使用的区域。

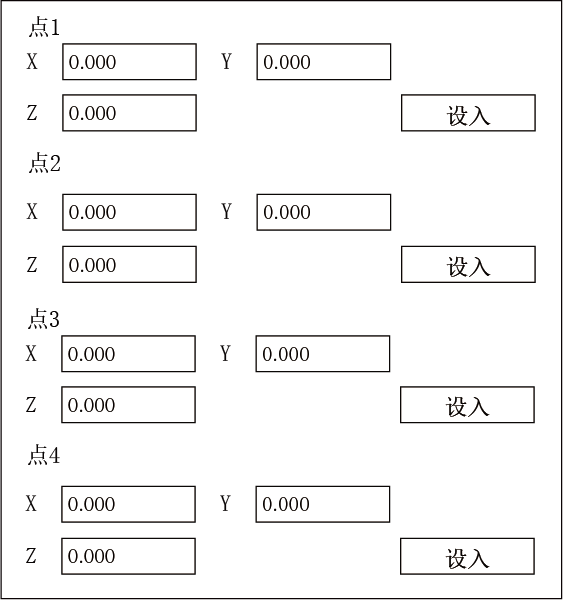
3、选择并设置每个轴上限制点位置,可直接编辑位置,也可在手动状态下移动轴至目标点,再在停止状态下设入位置。
4、设置好所有轴的限制点后,勾选使用框并点击【确定修改】按钮。