

咨询电话
13924666952
400-158-1606

工业机器人控制系统的路径引用地址,系统为华成工控系列关节机器人系统,路径引用界面为机器人控制器的扩展功能。进入界面如下:

路径引用地址功能主要是通过引用地址的方式来走路径。使用此功能需要同时使用数据指令功能先定义地址并给地址进行赋值。
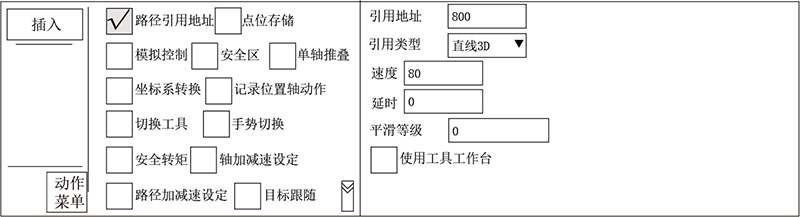
引用地址:可引用800-890的地址。
引用类型:可引用的路径类型为直线3D、姿势直线、自由路径、相对姿势直线四种。
直线3D:只使用XYZ轴走直线,若引用地址处为800,则默认800地址里的内容赋值给X轴,801地址里的内容赋值给Y轴,802地址里的内容赋值给Z轴。
姿势直线:使用XYZUVW六个轴走姿势直线,若引用地址处为800,则默认800地址里的内容赋值给X轴,801地址里的内容赋值给Y轴,802地址里的内容赋值给Z轴,803地址里的内容赋值给U轴,804地址里的内容赋值给V轴,805地址里的内容赋值给W轴。
自由路径:使用XYZUVW六个轴走自由路径,若引用地址处为800,则默认800地址里的内容赋值给X轴,801地址里的内容赋值给Y轴,802地址里的内容赋值给Z轴,803地址里的内容赋值给U轴,804地址里的内容赋值给V轴,805地址里的内容赋值给W轴。
相对姿势直线:使用XYZUVW六个轴走相对姿势直线,若引用地址处为800,则默认800地址里的内容赋值给X轴偏移,801地址里的内容赋值给Y轴偏移,802地址里的内容赋值给Z轴偏移,803地址里的内容赋值给U轴,804地址里的内容赋值给V轴,805地址里的内容赋值给W轴。

