

咨询电话
13924666952
400-158-1606

六轴关节机器人控制系统为华成系列的关节机器人控制系统,电机参数设置操作如下:
点击示教器机器设定,单击“电机参数”按钮进入如下界面,在此界面下可对轴进行选择使用,以及有关于与轴的设置。
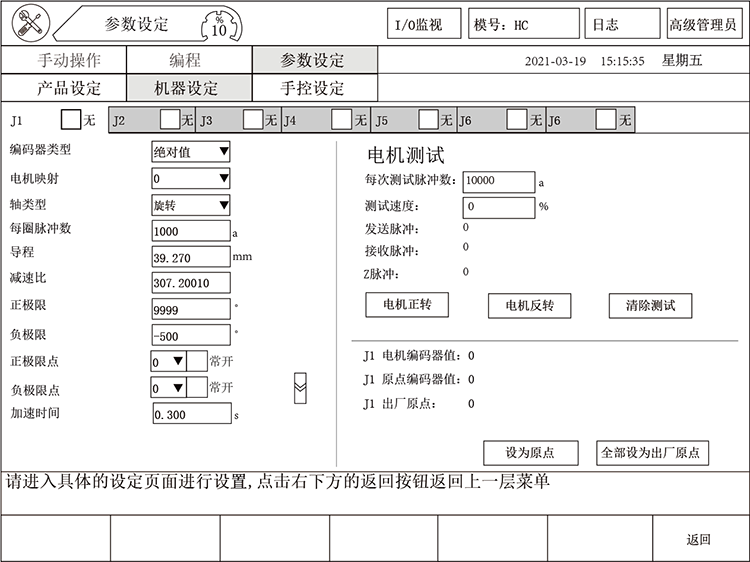
轴使用:默认所有的轴都是选择为使用,如不需使用,请勾选“无”选择框。
编码器类型:目前类型分为五种“增量”、“ 绝对值”、“步进”、“光栅尺”、“旋转编码器”。
电机映射:四关节机器人如下表显示:X轴对应电机映射0,Y轴对应电机映射2,Z轴对应电机映射3,U轴对应电机映射1。
电机映射 | 轴类型 | 动力线端口(UVW) | 编码器端口 | 刹车信号 |
0 | X | S1 | ENCODER1 | DO1 |
2 | Y | S3 | ENCODER3 | DO3 |
3 | Z | S4 | ENCODER4 | DO4 |
1 | U | S2 | ENCODER2 | DO2 |
六关节机器人如下表显示:X轴对应电机映射0,Y轴对应电机映射2,Z轴对应电机映射4,U轴对应电机映射5,V轴对应电机映射3,W轴对应电机映射1。
电机映射 | 轴类型 | 动力线端口(UVW) | 编码器端口 | 刹车信号 |
0 | X | S1 | ENCODER1 | DO1 |
2 | Y | S3 | ENCODER3 | DO3 |
4 | Z | S5 | ENCODER5 | DO5 |
5 | U | S6 | ENCODER6 | DO6 |
3 | V | S4 | ENCODER4 | DO4 |
1 | W | S2 | ENCODER2 | DO2 |
轴类型:轴类型分为旋转、直线和旋转清零三种。
每圈脉冲数:设定伺服电机每转一圈发多少个脉冲。一般设置一圈发送10000个脉冲。
每转距离:设定各伺服轴电机每转一圈运行的距离。点击电机正转,量取对应轴实际运行的距离,该距离即该轴电机旋转一圈运行的距离。
减速比:设定伺服电机的减速比。
减速比是指减速机构中瞬时输入速度与输出速度的比值,用符号"i"表示。
一般减速比的表示方法是以1为分母,用":"连接的输入转速和输出转速的比值,如输入转速为1500r/min,输出转速为25r/min,那么其减速比则为:i=60:1。
正极限:轴移动的最大距离。
负极限:轴移动的最小距离。
正极限点:此项可自行定义X轴的正极限的点,默认为常闭点,勾选表示设置为常开点,在方框输入指定数值代表指定某个输入点作为X轴正极限点,详细数值对照请参照如下表格:
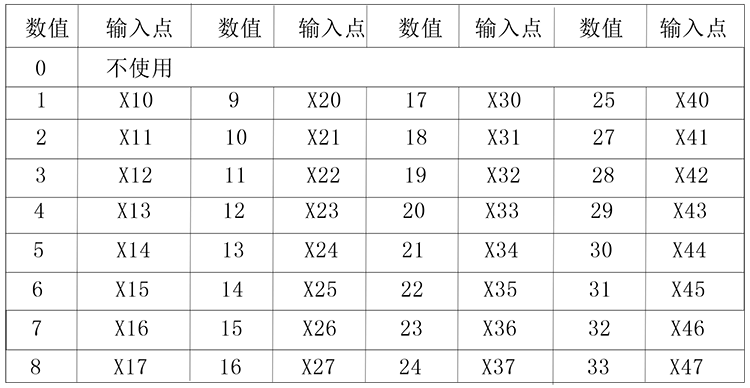
负极限点:此项可自行定义X轴的负极限的点,默认为常闭点,勾选表示设置为长开点,在方框输入指定数值代表指定某个输入点作为X轴负极限点,详细数值对照请参照如下表格:

加速时间:设定伺服电机的加速时间。
减速时间:设定伺服电机的减速时间。
最大速度:设定伺服电机的最大运行速度。
【S加速1:第1段“变加速段”;S加速2:第3段“变加速段”;S减速1:第5段“变减速段”;S减速2:第7段“变减速段”】以上的操作,关注下一节《多关节机器人控制系统的结构参数的设置》
电机正转:进行电机正转测试,测试和反馈都显示10000,表示测试成功。
电机反转:进行电机反转测试,测试显示10000,反馈显示-10000,表示测试成功。
设为原点:把单个轴或所有轴移动至原点然后点“设为原点”或“全部设为原点”最后点击“保存”按钮即可。
测试速度:设置电机进行电机正反转测试的速度。

