

咨询电话
13924666952
400-158-1606

桁架机械手系统为华成系列通用型机械手控制系统,堆叠的类似有:①、一般堆叠;②、装箱和箱内堆叠;③、数据源堆叠;④、码垛;⑤、矩形料盘五类。
三点法为矩形的堆叠方法,堆出矩形状的操作方法:
①首先点击“新建”按钮新建堆叠名称或打开已建文件名。
②点击“→”进入堆叠编辑界面。
③设置起始点坐标及间距。
三点法设置方式有两种,包括了使用和不使用三点法:
使用三点法设入:三点法就是利用已经设入的三个点自动算出偏移量、间距。
第一步:在手动状态下点击“三点法设定”按钮进入如下图所示的编辑页面。
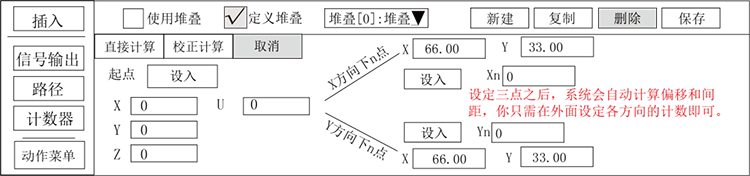
第二步:在手动状态下移动机械手到堆叠起始点位置然后点击“设入”按钮把当前坐标值是设入各轴的坐标编辑框。
第三步:移动机械手到X轴方向上的第n点然后点击“设入”按钮把坐标值设入到X, Y坐标编辑框中。接着移动机械手到Y轴方向上的第n点然后点击“设入” 按钮把坐标值设到X,Y坐标编辑框中。
第四步:在n值输入框中输入n的数值
第五步:点击“确定”按钮返回上一页面进行其他设置。
不使用三点法:手动计算间距。
第一步:进入如下图所示的界面后在手动状态下移动机械手至堆叠起始点然后点击“设入”按钮把当前坐标值设入到各轴的坐标编辑框中。
第二步:手动测量各轴方向上各点之间的间距并把间距值编辑到相应的编辑框。
第三步:设置各轴堆叠的方向,正向指的是轴位置+的方向(按一下手控器上的轴按键 即可辨别)反向指的是轴位置-的方向。

