

咨询电话
13924666952
400-158-1606

六关节机器人系统应用采用华成系列六轴机器人控制系统,首次通电后需要注意的参数设置问题,分为伺服电机的参数和结构的参数设置。
伺服电机参数设置

1、编码器类型首先要确认是绝对值,相应的伺服参数9号参数应为1;
2、华成系列六关节一体柜的映射为xyzuvw-024531;
3、六关节的轴类型都为旋转,该类型反映的是本体实际运动的类型,直线或旋转;
4、每转脉冲数为10000,但是特点的情况下,每转脉冲数有可能是17位;
5、每个轴的减速比要确定正确,减速比不正确会影响机器人走直线;
6、正负极限,正负极限是机器快要到硬限位还没到硬限位做的一个保护,应与实际情况进行填写;
7、伺服电机正转测试,这里要求伺服电机正转的方向应该与系统规定的方向一致,如果不一致需要修改伺服参数里的值。
注:之所以要先确定减速比和伺服电机方向再确定原点,是因为修改减速比和伺服电机方向原点位置会变
本体结构参数设置
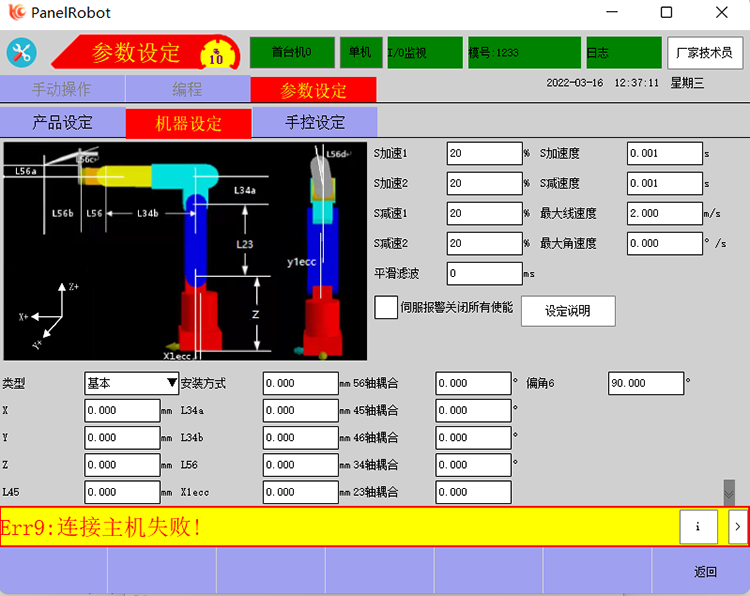
1、设置相应的结构参数(参数由本体厂家提供),此参数影响机器走直线;
2、设置S加减速度时间,S加减速度时间决定启动和停下来的瞬时时间,时间越短,停顿感越强烈;
3、设置最大线速度与角速度,线速度决定走世界坐标的速度,角速度决定走关节的速度;
4、存在耦合时,设置相应的耦合,该参数也会导致走不了直线;
5、设置相应的偏角。

