

咨询电话
13924666952
400-158-1606

注塑机械手控制系统,采用华成工控系列注塑机机械手系统。系统中伺服参数设定——增益参数设置。
机械手手控器在停止画面下,按“功能/同步”键两次,即进入密码画面,输入密码“7752”再按“输入”键,即进入特殊功能3画面,此页面可修改伺服的增益参数。

*1、速度环增益:设置伺服的速度环增益值。(范围0-500)无需调整,跟随刚性系数自动调整。 【越大则响应越快,过大会引起震动】【立即生效】
*2、速度环积分:设置伺服的速度环积分值。(范围0-300)无需调整,跟随刚性系数自动调整。【越小积分作用越强,速度跟踪能力越强】【立即生效】
*3、位置环增益:设置伺服的位置环增益值。(范围0-20)无需调整,跟随刚性系数自动调整。【越大则响应越快,过大会引起震动】【立即生效】
*4、刚性系数:调节机器的整体增益参数。(范围50-300)。调整此项,前3项会同时调整。【越大响应越好,过大会震动】【立即生效,建议增益只修改此项】
*5、电机方向:调节电机的正反转。(范围0-1)。【急停状态下修改,关电重启生效】
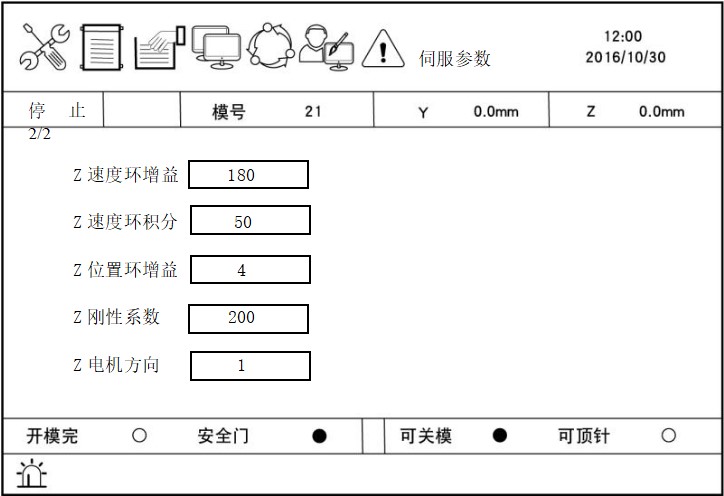
*1、Z速度环增益:设置伺服的速度环增益值。(范围0-500)无需调整,跟随刚性系数自动调整。【越大则响应越快,过大会引起震动】【立即生效】
*2、Z速度环积分:设置伺服的速度环积分值。(范围0-300)无需调整,跟随刚性系数自动调整。【越小积分作用越强,速度跟踪能力越强】【立即生效】
*3、Z位置环增益:设置伺服的位置环增益值。(范围0-20)无需调整,跟随刚性系数自动调整。【越大则响应越快,过大会引起震动】【立即生效】
*4、Z刚性系数:调节机器的整体增益参数。(范围50-300)。调整此项,前3项会同时调整。【越大响应越好,过大会震动】【立即生效,建议增益只修改此项】
*5、Z电机方向:调节电机的正反转(范围0-1)。【急停状态下修改,关电重启生效】

