

咨询电话
13924666952
400-158-1606

RX系列机器人控制系统型号(EC-R4、EC-R6、EC-R7、EC-R8),手动状态切换高级管理员。在此界面下可标定工作台:
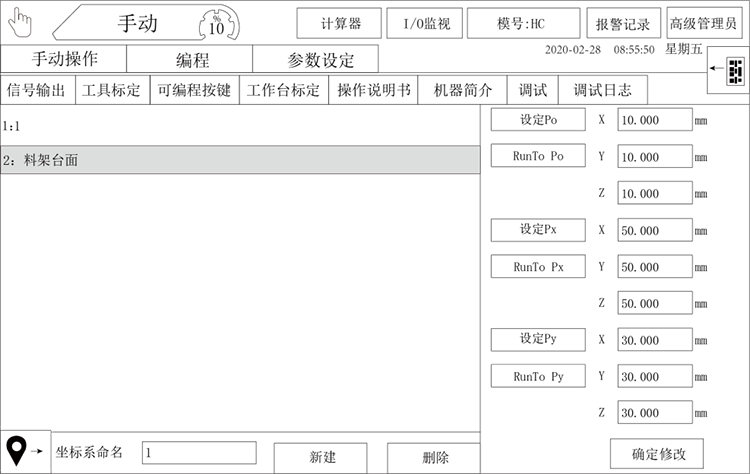
定义:工作台标定即使用户坐标系定义在工件上,在机器人动作允许范围内的任意位置,设定任意角度的X、Y、Z 轴,原点位于机器人抓取的工件上,坐标系的方向根据客户需要任意定义。用户坐标可以设置多个,如下图:
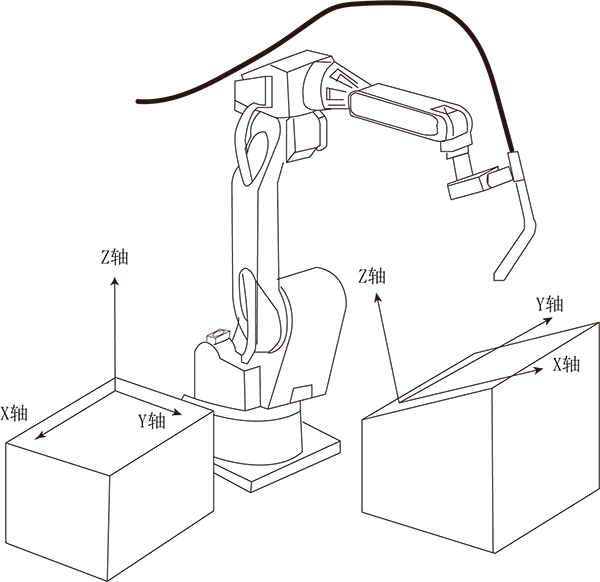
标定过后的坐标系即以工件做平移或垂直于工件运动
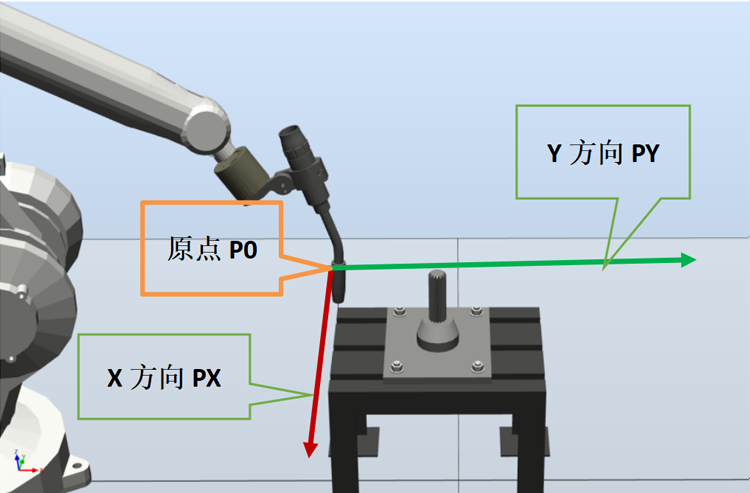
工作台在使用的时候需要标定3点,第一点原点P0,第二点以P0为原点向Y方向移动取1点设入到PY,第3点以P0为原点像X方向移动取一点设入到PX。
在使用工作台时,需要将坐标系选择为工作台坐标。
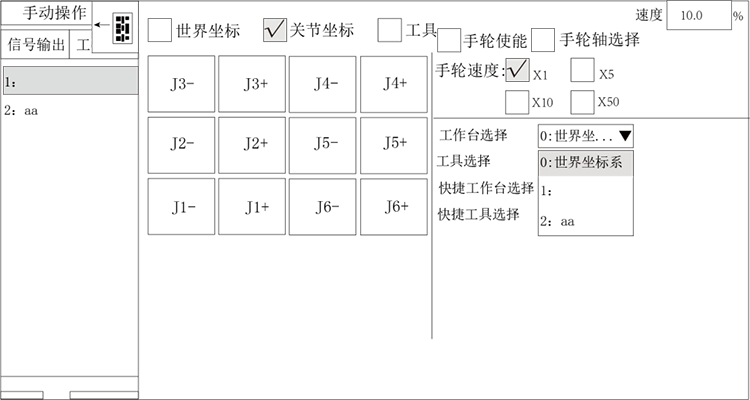
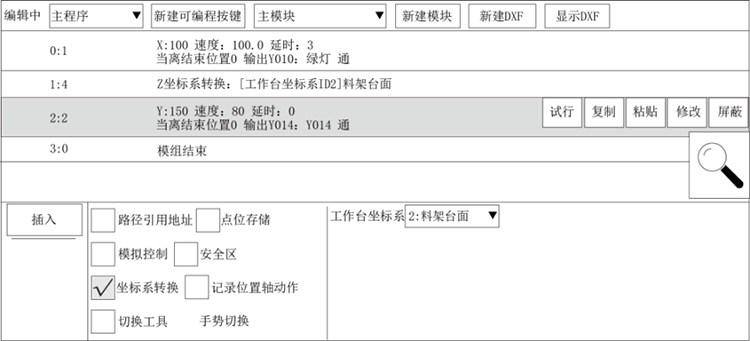
然后在教导程序的时,需要先将坐标系切换为工作台坐标系,然后以工作台坐标系位置插入程序。
P0:起始点位置。
Px:X轴上的位置。
Py:Y轴上的位置。
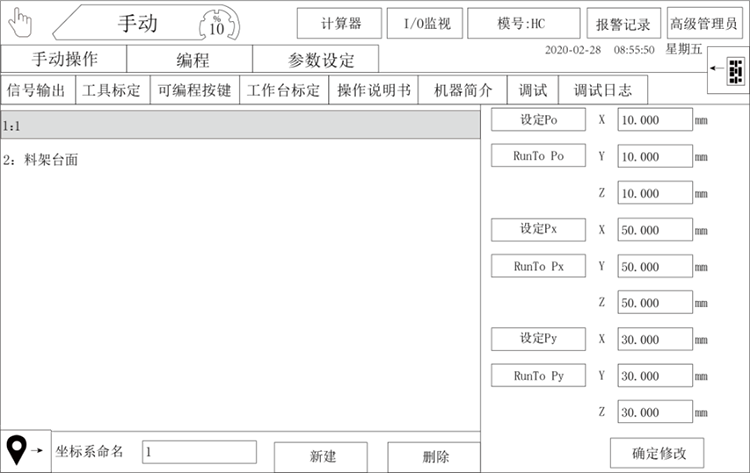
1、输入坐标系名称点击“新建”按钮新建坐标系。
2、在工作台的设入P0、Px、Py点。
3、点击“确定修改”按钮转换坐标。
注意:P0Px和PxPy两条线相交为90°且右手四指从X轴向Y轴方向握,大拇指应当朝上。

